De stabiliteit van de Lagrange-punten
Welke Lagrange-punten zijn stabiel en welke niet?
Op
deze pagina
stond de vraag centraal: waar liggen de Lagrange-punten?
Het bleek dat er vijf Lagrange-punten zijn, punten waar zwaartekracht en centripetale kracht in evenwicht zijn.
Nu komt de logische vervolgvraag: wat kun je ermee?
Kun je op die posities een ruimtestation of een ruimtetelescoop plaatsen of geeft dat problemen?
Met andere woorden, we willen weten of de Lagrange-punten stabiele posities in de ruimte zijn waar
je ‘iets neer kunt zetten’.
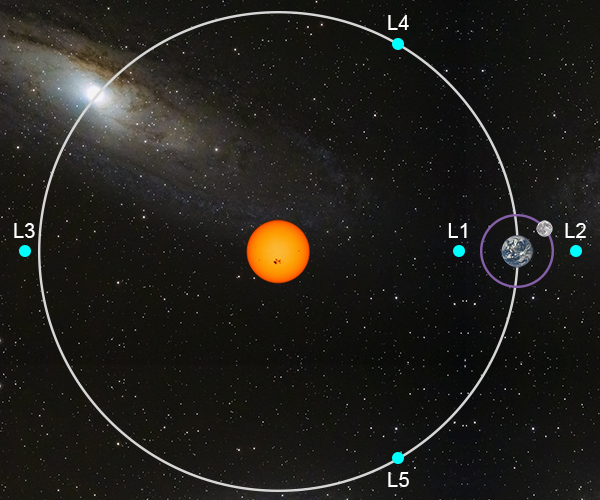
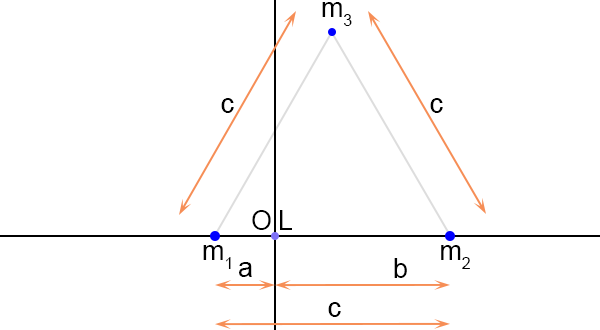
De Lagrange-punten (niet op schaal)
Onze uitgangspunten blijven onveranderd:
- het derde object heeft een massa die veel kleiner is dan de andere twee objecten zodat het zwaartepunt van het systeem
op dezelfde plaats blijft na toevoeging van het derde object,
- de objecten beschrijven cirkelvormige banen (in werkelijkheid zijn de planeetbanen ellipsen, maar de afwijking van de
perfecte cirkel is vaak gering en dit vereenvoudigt het rekenwerk enorm).
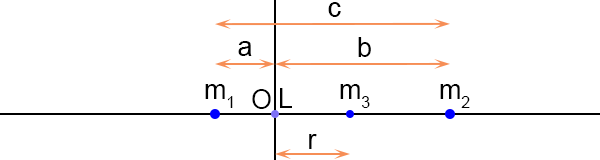
De drie objecten noem ik m
1, m
2 en m
3 waarbij m
3 het derde object is met een massa
die veel kleiner is dan m
1 en m
2.
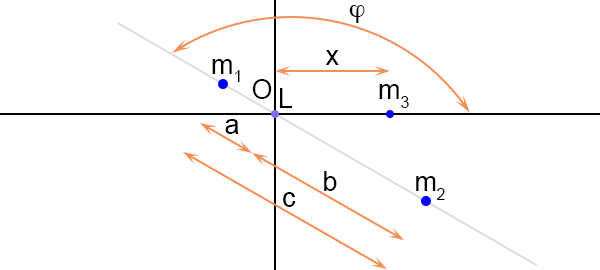
L is het zwaartepunt, gelegen in de oorsprong O, en in de vergelijkingen is L de som van de massa’s.
De afstand van m
1 tot de oorsprong is a, de afstand van m
2 tot de oorsprong is b en de afstand van
m
3 tot de oorsprong is r.
G is de gravitatieconstante.
Op
deze pagina
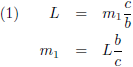
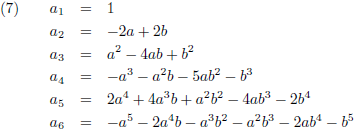
vond ik de volgende vergelijkingen als relatie tussen de massa’s en de afstanden:
En ik vond dat voor de hoekfrequentie van alle objecten geldt:
Drie Lagrange-punten kunnen gevonden worden door het vinden van het (enige) nulpunt van deze vijfdegraads vergelijking:
Voor L
1, gelegen tussen m
1 en m
2, geldt:
Voor L
2, gelegen rechts van m
2, geldt:
Voor L
3, gelegen links van m
1, geldt:
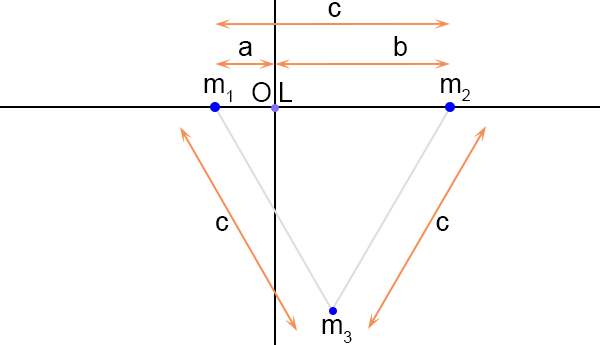
L
4 en L
5 liggen in een perfecte gelijkzijdige driehoek met m
1 en m
2:
Maar hoe komen we er nu achter of een Lagrange-punt stabiel is?
Indien zich iets in een Lagrange-punt bevindt, blijft dat object daar dan of drift het daar langzaam (of snel) uit weg?
Dit heeft te maken met het wel of niet hoeven te verrichten van arbeid.
Indien je stevig aan de slag moet om m
3 van zijn plaats af te krijgen dan moet je arbeid verrichten en is
het Lagrange-punt stabiel.
Is het daarentegen voldoende om alleen maar even tegen m
3 aan te blazen en hij gaat er al vandoor dan is er
duidelijk geen sprake van een stabiele situatie.
In het eerste geval kun je zeggen dat m
3 in een dal ligt en tegen een bergwand opgeduwd moet worden en in het
tweede geval ligt m
3 bovenop een bergtop en rolt hij bij het minste of geringste van de berg af.
De positie in het dal is stabiel en de positie op de bergtop is dat niet.
De Lagrange-punten liggen op punten waar het zwaartekrachtveld en het centripetale veld elkaar in evenwicht houden en het
berglandschap met de toppen en de dalen van die velden noemen we de
potentiaalfunctie.
In zijn algemeenheid geldt voor de te verrichten arbeid W dat die gelijk is aan de uitgeoefende kracht in de richting van
de afgelegde weg:
Indien de kracht een zwaartekracht is, bijvoorbeeld de zwaartekracht die m
3 van m
1 ondervindt,
dan wordt vergelijking (8):
De zwaartekracht die m
1 ‘uitstraalt’ noem ik het veld V.
Daarmee kan ik vergelijking (9) ook schrijven als:
Ik ga nog een stapje verder:
Hierin is Φ potentiaalfunctie en de ∆ komt er bij in omdat de (bepaalde)
integraal
ook een verschil tussen ‘hier’ en ‘daar’ aangeeft.
Oftewel:
De potentiaalfunctie van het zwaartekrachtveld van m
1 is:
De potentiaalfunctie van het zwaartekrachtveld van m
2 is:
En de potentiaalfunctie van het centripetale veld is:
Weet je wat nou zo ontzettend prettig is?
Potentiaalfuncties zijn
geen vectorfuncties maar kunnen gewoon als getallen bij elkaar opgeteld worden.
Wanneer we het over krachten hebben dan praten we over vectoren en die tellen we als vectoren bij elkaar op.
Op de posities waar de Lagrange-punten liggen is er een evenwicht en is de resulterende kracht nul:
In navolging hierop kan ik voor de totale potentiaalfunctie, van alle velden samen, schrijven:
Dit ga ik combineren met de vergelijkingen (13), (14) en (15):
Met behulp van de vergelijkingen (1), (2) en (3) wordt dit:
Voor x = −a of x = b komt hier −∞ uit en daaromheen niet.
Dus m
1 en m
2 liggen ieder stevig in een dal (zoals te verwachten was).
Laten we maar eens gaan rekenen.
Ik heb vergelijking (19) in een Excel-file gestopt en gekeken wat de potentiaal doet op enige afstand ∆x (naar links of naar
rechts) of ∆y (naar boven of naar onderen) van de Lagrange-punten.
En wat blijkt dan?
De punten L
1, L
2 en L
3 liggen in een potentiaal-zadel (een zadel heeft de vorm van een dal in de ene
richting en de vorm van een berg in de andere richting, een ruiter op een paard zit in de rijrichting in een dal en loodrecht daarop
op een berg zodat hij zijn benen kwijt kan) en L
4 en L
5 liggen op een potentiaalberg.
Oftewel, de eerste drie Lagrange-punten zijn in één richting stabiel en in de andere richting niet, en de andere twee Lagrange-punten
zijn in alle richtingen labiel.
Echter, dit is wat kort door de bocht want de zaak ligt iets gecompliceerder.
In vergelijking (15) heb ik de potentiaalfunctie uitgerekend van het centripetale veld en daarbij heb ik de
hoeksnelheid ω als
constant verondersteld en was de afstand r de enige variabele op het moment dat ik de
integraal
uitrekende.
Voor de hoeksnelheid geldt:
Indien m
3 een Lagrange-punt verlaat in de draairichting, en dus ‘ervoor’ of ‘erachter’ terechtkomt, dan zal zijn snelheid
iets hoger of iets lager geworden zijn en dus ook zijn hoeksnelheid.
En als m
3 een Lagrange-punt verlaat loodrecht op de draairichting (wat zowiezo het gevolg is van een snelheidsverandering),
en dus ‘ernaast’ terechtkomt, dan zal zijn afstand r tot het zwaartepunt veranderen en daardoor ook weer zijn hoeksnelheid.
Kortom, de hoeksnelheid is allerminst een constante maar is onderdeel van subtiele veranderingen.
Deze subtiele veranderingen vragen om een nader onderzoek.
Tot nu toe zijn wij de toeschouwers van het hele systeem dat gevormd wordt door m
1, m
2 en m
3.
We hebben een coördinatenstelsel aangelegd en wij zien het hele systeem met massa’s daarin met een hoeksnelheid ω ronddraaien.
Dit coördinatenstelsel van ons kent ergens in het universum een hele speciale verankering, want in dit coördinatenstelsel zijn alle
posities absoluut, alle snelheden zijn absoluut en alle versnellingen zijn absoluut.
Nu gaan we van plaats wisselen.
We gaan plaatsnemen in het ronddraaiende systeem, we stappen als het ware in de draaimolen, en gaan meedraaien met het systeem.
Dan verandert uiteraard ook ons coördinatenstelsel.
Het oorspronkelijke (absolute) coördinatenstelsel noem ik α en daarin geldt:
Dit is inderdaad nogal wiedus.
Stel dat ik ergens een nieuw coördinatenstelsel aanleg, en dat noem ik β, dat verplaatst is ten opzichte van α in de
x, y en z-richting over respectievelijk x
α,0, y
α,0 en z
α,0, dan kan ik de
α-coördinaten schrijven als functie van de β-coördinaten als volgt:
Nu ga ik het β-stelsel ook nog draaien ten opzichte van α (in het x-y-vlak) over een vaste hoek φ.
De α-coördinaten als functie van de β-coördinaten worden dan:
Maar ik wil niet een eenmalige rotatie over een bepaalde hoek maar ik wil continu meedraaien met een bepaalde hoeksnelheid Ω.
Dus de rotatiehoek φ wordt een functie van de tijd als volgt:
Dit tussenresultaat ga ik als vectorvergelijking schrijven:
De vector aan de linkerkant van de vergelijking is de positie in het absolute systeem en daarvan ga ik de grootte uitrekenen:
Daarmee wordt vergelijking (25):
En omdat α het absolute systeem is kan ik ook schrijven:
Ik ga ook de grootte uitrekenen van de eerste vector aan de rechterkant van de vergelijking:
Daarmee wordt vergelijking (28):
Tenslotte komen we bij de laatste vector.
Ook daarvan ga ik de grootte uitrekenen:
Vergelijking (30) wordt dan:
Omdat β het roterende coördinatenstelsel is kan ik ook schrijven:
Dit resultaat zetten we even apart.
Door de vergelijkingen (24) te
differentiëren
naar de tijd verkrijg ik snelheden:
De vergelijkingen (34) ga ik als vectorvergelijking schrijven:
De vector aan de linkerkant van de vergelijking is de snelheid in het niet-roterende systeem, het absolute systeem, en daarvan
ga ik de grootte uitrekenen:
Daarmee wordt vergelijking (35):
Oftewel:
Ik ga ook de grootte uitrekenen van de eerste vector aan de rechterkant van de vergelijking:
Daarmee wordt vergelijking (38):
En zoals bekend is β het roterende coördinatenstelsel:
Tenslotte komen we bij de laatste vector.
Ook daarvan ga ik de grootte uitrekenen:
Vergelijking (41) wordt dan:
Die laatste term is inderdaad een snelheid, maar toch gaat er nu iets niet goed.
De positievector
rβ wijst naar buiten en dat is natuurlijk niet de richting van de snelheid in een
ronddraaiend systeem want die staat daar loodrecht op.
Dat kun je ook zien aan de vector van vergelijking (42) door die in α-coördinaten te schrijven:
Bovenaan staat de negatieve y-coördinaat en daaronder staat de x-coördinaat om duidelijk te maken dat er een draaiing over negentig
graden heeft plaatsgevonden.
Dus of we houden vast aan vergelijking (41):
Of we nemen de draaiing over negentig graden mee in de vectornotatie:
Goed, ook dit parkeren we even.
Ik pak de vergelijkingen (34) weer op en door die nogmaals te
differentiëren
naar de tijd vormen zich versnellingen:
Zo, nu heb ik alles wat ik weten wil over wat er gebeurt in mijn nieuwe roterende coördinatenstelsel.
Dit stelsel draait rond met een constante hoeksnelheid Ω en daarin liggen m
1 en m
2
en de vijf Lagrange-punten muurvast op hun plaats.
Omdat de hoeksnelheid constant is betekent dat:
Daarmee vereenvoudigen de vergelijkingen (46) tot:
Dit is wederom een goed moment om dit tussenresultaat als vectorvergelijking te schrijven:
De vector aan de linkerkant van de vergelijking is de versnelling in het niet-roterende systeem, het absolute systeem, en daarvan
ga ik de grootte uitrekenen:
Daarmee wordt vergelijking (49):
Oftewel:
Ik ga ook de grootte uitrekenen van de eerste vector aan de rechterkant van de vergelijking:
Daarmee wordt vergelijking (52):
En omdat β het roterende systeem is:
Vervolgens ga ik ook de grootte uitrekenen van de tweede vector aan de rechterkant van de vergelijking:
En dit gaat inderdaad analoog aan vergelijking (31) (zoals het natuurlijk ook zou moeten gaan).
De tweede term aan de rechterkant is daarmee geen onbekende, het is de centripetale versnelling:
De centripetale versnelling werkt inderdaad naar buiten toe in de richting van de positievector
r dus dit klopt volledig.
Daarmee wordt vergelijking (55):
Tenslotte komen we bij de laatste vector.
Ook daarvan ga ik de grootte uitrekenen:
De laatste term wordt daardoor:
Die laatste term is inderdaad een versnelling, maar er gaat opnieuw iets niet goed.
De x-component van de vector hierboven is de negatieve y-component van de snelheid en de y-component is de x-component van de snelheid.
Deze versnelling staat loodrecht op de snelheid en dat is de
naar buiten gerichte snelheid.
Dat is goed te zien door de componenten van deze snelheidsvector te vergelijken met de componenten van de positievector van vergelijking (44).
Daar stond de snelheidsvector loodrecht op de naar buiten gerichte positievector en hier staat de versnellingsvector loodrecht op de naar
buiten gerichte snelheidsvector.
Dus of we handhaven vergelijking (58):
Of we nemen de draaiing over negentig graden mee in de vectornotatie:
De laatste term is de Coriolis-versnelling.
Over deze versnelling zijn in de loop van de tijd heel wat boeken volgeschreven en de discussies lopen hoog op of dit
nou een echte versnelling is of een mathematisch trucje.
Het antwoord is: net als de centripetale versnelling is de Coriolis-versnelling een wiskundig verschijnsel.
Zeker in dit geval is het wel heel duidelijk dat de Coriolis-versnelling hartstikke nep is.
Het zou wel heel raar zijn indien ergens ineens een versnelling optreedt als een waarnemer besluit om een ander coördinatenstelsel
in het leven te roepen.
Een coördinatenstelsel is immers alleen maar een wiskundig hulpmiddel en heeft geen enkele invloed op de echte wereld.
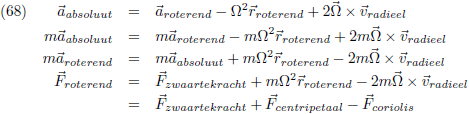
Zo komen we uiteindelijk tot:
Of anders opgeschreven:
Als ik zometeen een wandeling ga maken in zuidelijke richting, richting de evenaar, met constante snelheid, dan gaat ongemerkt
toch mijn snelheid toenemen.
Om precies te zijn: mijn snelheid loodrecht op mijn wandelrichting.
Ik wandel in zuidelijke richting en mijn snelheid in oostelijke richting gaat toenemen.
Waarom?
Aan de evenaar is de omtrek van de Aarde ongeveer 40000 kilometer en de Aarde draait in 24 uur om haar as dus iemand die op de
evenaar staat heeft een snelheid in oostelijke richting van bijna 1700 km/uur.
Op de noordpool is de omtrek van de Aarde nul en dus ook de snelheid van iemand die daar zou staan.
Door van de noordpool naar de evenaar te lopen neemt je oostwaarts-gerichte-snelheid dus toe van nul km/uur naar 1700 km/uur.
En snelheidsverandering is per definitie versnelling.
Deze versnelling, die ontstaat door beweging loodrecht op de rotatie-as, is Coriolis-versnelling.
Wanneer ‘iets’ in een roterend systeem loodrecht op de rotatie-as beweegt
EN (!!!) dat ‘iets’ heeft interactie met het
roterende syteem dan is er een Coriolis-versnelling.
Wanneer ik in het midden van een draaimolen sta en ik gooi een balletje naar buiten dan wordt dat balletje echt niet afgebogen
door de draaimolen (want er is geen interactie).
Echter, rol ik het balletje over de vloer van de draaimolen dan natuurlijk wel (want er is wel interactie).
Hier hoort ook nog weer een kanttekening bij, want het maakt wel degelijk uit wie de waarnemer is.
Wanneer ik vanuit het midden van de draaimolen een balletje naar buiten gooi dan volgt dat balletje uiteraard een rechte lijn
voor een waarnemer
buiten de draaimolen.
Echter, voor iemand
in de draaimolen volgt het balletje geen rechte lijn omdat die persoon zelf ronddraait.
De waarnemer-in-de-draaimolen zal claimen dat er een Coriolis-versnelling inwerkt op het balletje en een
waarnemer-buiten-de-draaimolen zal hem mogelijk hard uitlachen.
Maar in het geval van een wervelstorm zullen een waarnemer-in-de-wervelstorm en een waarnemer-buiten-de-wervelstorm het absoluut
met elkaar eens zijn dat het stormt.
Nu hebben we een roterend coördinatenstelsel aangelegd met daarin een Coriolis-versnelling en die versnelling is dus puur een
wiskundige kunstgreep.
En toch gaat deze kunstgreep ons helpen.
Want op het moment dat m
3 uit een Lagrange-punt wegdrijft wordt de Coriolis-versnelling actief en het product van
m
3 en de Coriolis-versnelling wordt een schijnkracht.
Ik zet datgene wat we gevonden hebben aan transformatievergelijkingen even bij elkaar:
Ik laat de oorsprongen van beide coördinatenstelsels voor het gemak samenvallen.
Dan gaat vergelijking (33) over in:
In het absolute stelsel draaien de massa’s en de Lagrange-punten rond met een snelheid:
Dit ga ik inbrengen in vergelijking (45):
Door Ω dat zo te kiezen dat die gelijk is aan ω, dat was immers de hele tijd de bedoeling, en met vergelijking (64) op de
achtergrond, gaat vergelijking (66) over in:
En inderdaad, de snelheidsvector in het roterende stelsel wordt nul zoals de bedoeling was.
Ik ga nu even knutselen met vergelijking (63).
Door te vermenigvuldigen met massa worden de versnellingen krachten:
De eerste term aan de rechterkant is de zwaartekracht, een echte kracht, en die is naar de oorsprong toe gericht (laten we voor het gemak
even uitgaan van twee objecten die om elkaar heen draaien).
De tweede term aan de rechterkant is de centripetale kracht, een schijnkracht, en die is van de oorsprong af gericht.
In een stationair systeem zal er geen radiële snelheid zijn en is de laatste term, de
Coriolis-kracht, nul.
De zwaartekracht en de centripetale kracht heffen elkaar precies op en een ruimtevaarder in een baan om de Aarde voelt inderdaad netto
geen enkele kracht op zichzelf uitgeoefend (oftewel, de kracht aan de linkerkant van de vergelijking is nul).
In het roterende stelsel liggen m
1, m
2 en de Lagrange-punten dus vast op hun plaats.
Het roterende stelsel leg ik zo neer dat het Lagrange-punt, met daarin m
3, ergens op de positieve x-as ligt.
In een plaatje ziet dat er zo uit:
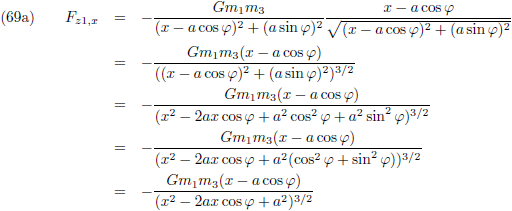
De zwaartekracht die m
1 uitoefent op m
3 is (het minteken vooraan komt omdat in dit geval de zwaartekracht naar
links gericht is):
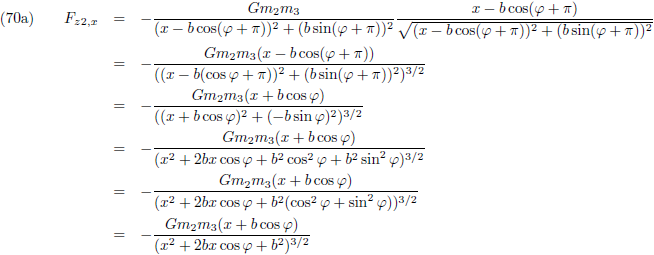
En de zwaartekracht die m
2 uitoefent op m
3 is:
De totale zwaartekracht die m
3 ondervindt is dus:
De centripetale kracht die m
3 ervaart in het roterende systeem is volgens vergelijking (68):
En aangezien y gelijk is aan nul, daarom leek het mij wel handig om m
3 op de x-as te plaatsen, wordt dit:
In het stationaire geval kent m
3 geen horizontale snelheid en is er daarom ook geen Coriolis-kracht.
Aldus geldt in het roterende systeem:
En wanneer je dit uitrekent dan komt daar perfect nul uit.
Maar stel dat een stuk steen in botsing komt met m
3 zodat m
3 ineens een snelheid(je) heeft in de
x-richting en de y-richting.
Door de snelheid in de x-richting treedt de Coriolis-kracht in werking en gaat vergelijking (74) over in
(zie vergelijking (68)):
Vervolgens deel ik alles door m
3 zodat de bovenstaande krachtenvergelijking overgaat in een versnellingenvergelijking:
Wat staat hier nou eigenlijk?
Indien door een verstoring de snelheid in de positieve y-richting toeneemt dan neemt de centripetale versnelling toe, en er ontstaat
een snelheid in de positieve x-richting.
Deze snelheid in de positieve x-richting veroorzaakt een Coriolis-versnelling in de
negatieve y-richting, dus tegengesteld
aan de verstoring.
Wanneer de verstoring zorgt voor een snelheid in de positieve x-richting dan activeert dat de Coriolis-versnelling,
en er ontstaat een snelheid in de negatieve y-richting.
Deze snelheid in de negatieve y-richting veroorzaakt een centripetale versnelling in de
negatieve x-richting (de centripetale
versnelling die er reeds is neemt af om precies te zijn), dus tegengesteld aan de verstoring.
En indien de verstoringen een snelheid de andere kant op veroorzaken dan zijn alle daaruit voortvloeiende acties uiteraard precies
de andere kant op dan hierboven beschreven.
Er is overduidelijk een regelmechanisme aanwezig dat verstoringen tegenwerkt.
Maar is dit regelmechanisme voldoende willen we natuurlijk weten?
Om daarachter te komen gaan we een beetje variatiewiskunde doen.
Allereerst verleg ik de oorsprong van mijn coördinatenstelsel naar het Lagrange-punt en ik laat de z-coördinaat voor het gemak
buiten beschouwing want die is toch nul.
Eerst lag een Lagrange-punt op (x
L, y
L, 0), maar in mijn nieuwe x-y-z-coördinaten ligt een Lagrange-punt op (0, 0, 0).
Dus:
Vervolgens vraag ik mij af wat er gebeurt indien m
3 kleine plaats- en snelheidsverstoringen ondergaat.
De plaatsverstoringen noem ik δx en δy en de snelheidsverstoringen duid ik aan met δv
x en δv
y.
Dit leidt tot de volgende veranderingen in het krachtenspel:
Dan is de logische volgende stap het bepalen van de
partiële afgeleiden
van de zwaartekracht.
Ik heb geen zin om m
3 de hele tijd mee te slepen dus die stel ik vanaf nu op één kilo.
Daarnaast noem ik de afstand van m
1 tot m
3 d
1 en de afstand van m
2 tot m
3 is d
2.
Daar gaan we:
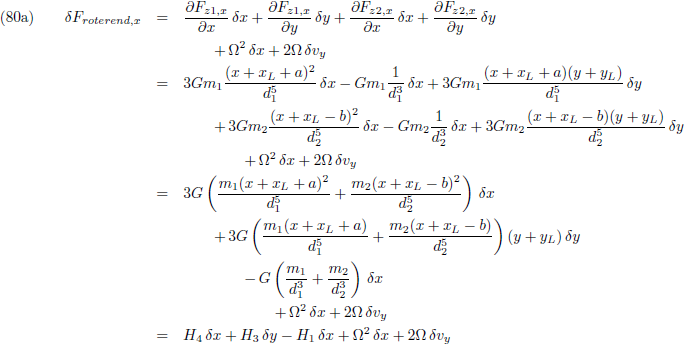
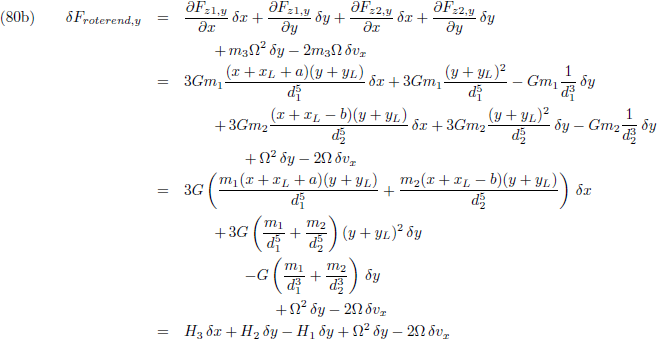
Deze
partiële afgeleiden
ga ik invullen in de vergelijkingen (78) en ik ga wat termen samenpakken om de boel overzichtelijk te houden:
Aangezien ik m
3 op één kilo heb gesteld kan ik in plaats van kracht ook versnelling schrijven:
Ik zal de hulpvariabelen even overzichtelijk op een rijtje zetten:
Maar hoe nu verder?
De vergelijkingen (81) zijn differentiaalvergelijkingen van de tweede orde:
Een gouden regel is dat alle natuurlijke processen verlopen volgens
e-
machten.
Dan is het een goede stap om het volgende te stellen:
Hierin zijn de σ’s bepaalde startwaarden.
De variaties van bovenstaande vergelijkingen worden dan:
Door de vergelijkingen (84) te
differentiëren
ontstaan snelheden:
En daar kan ik ook weer de variatie van opschrijven:
En door de vergelijkingen (86) te
differentiëren
ontstaan versnellingen:
Hiervan kan ik ook de variatie opschrijven:
De vergelijkingen (85), (87) en (89) ga ik invullen in de vergelijkingen (83):
Vervolgens deel ik die
e-
machten
uit en ga ik de boel wat reorganiseren:
Nu kan ik de vergelijkingen (91) aan elkaar gelijk stellen:
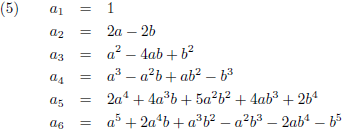
Met behulp van de
abc-formule
volgt hieruit:
We zijn hier aan het analyseren wat er gebeurt in een Lagrange-punt en daar zijn x en y gelijk aan nul.
Door ons eerst te richten op L
1, L
2 en L
3 geldt bovendien dat y
L = 0.
Daaruit volgt dat de hulpvariabelen H
2 en H
3 nul worden.
H
4 wordt:
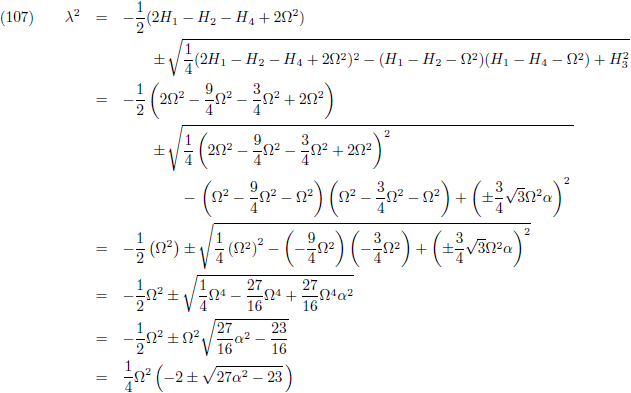
In dat geval vereenvoudigt vergelijking (93) tot:
Waaruit volgt voor λ:
Indien λ positief is dan groeit de
e-
macht,
zie de vergelijkingen (84), en gaat m
3 er gegarandeerd vandoor.
Uit vergelijking (96) volgen in principe vier λ’s omdat er vier verschillende plus/min combinaties zijn voor de
worteltekens.
Als de plus/plus combinatie een positieve waarde oplevert dan is er absoluut sprake van instabiliteit:
Ik heb vergelijking (97) toegevoegd in mijn Excel-file en het blijkt dat voor de eerste drie Lagrange-punten van het
Zon-Aarde systeem er altijd een positieve λ is en dat deze Lagrange-punten daarom
niet stabiel zijn.
De logische volgende vraag is natuurlijk of dit altijd zo is of dat dit toevallig zo is voor het Zon-Aarde systeem?
Om dat te onderzoeken gaan we vergelijking (97) eens tegen het licht houden.
Allereerst kijken we waar de binnenste
wortel
nul wordt:
Dus H
1 moet in het bereik liggen:
Ligt H
1 binnen deze grenzen dan komen we bij de
complexe
wortels
die op hun beurt weer een (positief)
reëel
deel met zich meedragen en dat willen we niet.
Dan willen we nog weten waar de buitenste
wortel
nul wordt:
Dit geeft een bereik voor H
1:
Buiten dit bereik komen we tot een positieve λ en dat is dus niet gewenst.
De combinatie van de vergelijkingen (99) en (101) geeft:
Vergelijking (82a) kunnen we omschrijven als volgt:
Waardoor vergelijking (102) te schrijven is als:
Ik noem dat middelste stuk de stabiliteitsfactor S en ik normaliseer voor het gemak naar c = 1.
Dan geldt voor S:
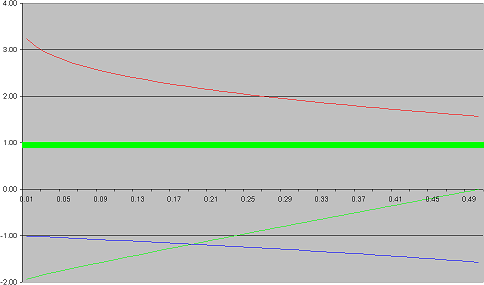
In onderstaande grafiek heb ik S uitgezet als functie van a:
De groene lijn is L
1, de rode lijn is L
2 en de blauwe lijn is L
3.
Helaas, helaas, de eerste drie Lagrange-punten zijn
nooit stabiel (want daarvoor moet S
tussen 8/9 en 1 liggen, zie vergelijking (104), zie de groene band in bovenstaande grafiek).
Dan resten nog de Lagrange-punten 4 en 5.
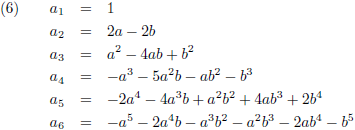
Daarom keren we nu terug naar vergelijking (93):
In de L
4 en L
5 punten zijn mijn hulpvariabelen:
Die ga ik vervolgens invullen in vergelijking (93):
Waaruit volgt voor λ:
Het stabiliteitsvraagstuk spitst zich ditmaal geheel toe op de binnenste
wortel.
Ik wil weten waar die
wortel
nul wordt:
De simpele voorwaarde voor stabiliteit voor L
4 en L
5 is dat m
1 minstens 25 maal de massa heeft
van m
2.
Aan deze voorwaarde wordt ruimschoots voldaan indien m
1 de Zon is en m
2 een willekeurige planeet in ons
zonnestelsel.
Ook alle planeet-maan systemen in ons zonnestelsel hebben stabiele L
4’s en L
5’s.
Een aantal opmerkingen tot slot:
- de Lagrange-punten hebben geen ‘zuigende’ werking, zoals de zwaartekracht van een ster of planeet dat heeft, want ze liggen niet
in een potentiaalput zoals een ster of planeet (dit blijkt uit de potentiaalfunctie volgens vergelijking (19)); of zich iets in
L4 of L5 ophoudt is daarom puur afhankelijk van toevallige passanten (die niet te veel snelheid mogen hebben,
want anders worden ze niet ingevangen),
- voor de L4 en L5 punten is er een regelmechanisme aanwezig dat objecten op hun plaats houdt of ze weer
naar het Lagrange-punt laat terugkeren na kleine verstoringen (zie vergelijking (76) en het stukje tekst daarna), maar in
het geval van een grotere verstoring dan gaat m3 er echt wel vandoor,
- in dit hele verhaal heb ik geen aandacht besteed aan de storende invloed van andere hemellichamen; weliswaar heeft iedere planeet
zijn eigen L4 en L5 punten die op zich stabiel zijn, maar de andere planeten, vooral Jupiter, zijn niet te
onderschatten verstoorders,
- objecten in de L4 en L5 punten noemt men Trojanen, waarbij men bij de planeet Jupiter de onderverdeling
heeft gemaakt in Trojanen en Grieken; de Trojanen bevinden zich in L4 (en ‘lopen’ dus voor de planeet uit) en de Grieken
bevinden zich in L5 (en ‘lopen’ dus achter de planeet aan), qua naamgeving zijn er twee historische foutjes ingeslopen en
bevindt één Trojaan (Hektor) zich in het Griekse kamp en één Griek (Patroclus) bevindt zich in het Trojaanse kamp,
- de L4 en L5 punten van de planeet Jupiter bevatten vele objecten (vele duizenden), de planeet Aarde
heeft één object (een rotsblok met een diameter van 300 meter) in L4, de planeet Mars heeft zeven Trojanen, bij de planeet
Neptunus staat de teller op zes en bij de planeet Uranus is er tot nu toe één object in L4 waargenomen, en voor de rest
zijn de Lagrange-punten simpelweg leeg; maar aangezien er in steeds hoger tempo hemelobjecten worden ontdekt is dit overzichtje
waarschijnlijk al weer achterhaald op het moment dat je dit leest,
-
L4 en L5 punten kunnen ook stofwolken bevatten (feitelijk heel veel heel kleine objecten), de zogenaamde
Kordylewski-wolken (genoemd naar de astronoom Kazimierz Kordylewski); of er zich bij de Aarde dergelijke wolken bevinden is
nog onderwerp van discussie (en veel gezoek),
- het meest populaire praktische gebruik van de Lagrange-punten is eigenlijk om er kunstmatige satellieten te parkeren; de
L1/2/3 punten zijn dan weliswaar niet stabiel maar dit is met stuurraketjes prima te corrigeren.












































































 Door naar het volgende vraagstuk: de wetten van Kepler met verwaarloosbare secundaire massa
Door naar het volgende vraagstuk: de wetten van Kepler met verwaarloosbare secundaire massa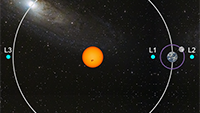 Terug naar het vorige vraagstuk: de posities van de Lagrange-punten
Terug naar het vorige vraagstuk: de posities van de Lagrange-punten Overzichtspagina met vraagstukken
Overzichtspagina met vraagstukken Overzichtspagina astronomie
Overzichtspagina astronomie De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integralen van
De integralen van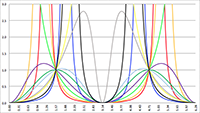 De integralen van
De integralen van Vectoren
Vectoren Vectoren, vraagstuk 40
Vectoren, vraagstuk 40 Vectoren, vraagstuk 85
Vectoren, vraagstuk 85 Taylor-reeksen
Taylor-reeksen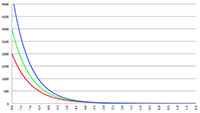 De Taylor-reeks van
De Taylor-reeks van De Taylor-reeksen van
De Taylor-reeksen van De stelling van Green
De stelling van Green Holomorfie van de functie
Holomorfie van de functie Holomorfie van de functie
Holomorfie van de functie Uitleg artikel algemene relativiteitstheorie: inleiding hoofdstuk B
Uitleg artikel algemene relativiteitstheorie: inleiding hoofdstuk B De Lorentz-factor
De Lorentz-factor De uitdijing van het heelal
De uitdijing van het heelal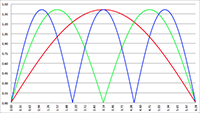 De integraal van
De integraal van De Witte Dag
De Witte Dag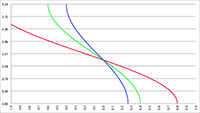 De integraal van
De integraal van De cycloïde
De cycloïde De minimale straal van een holle bol
De minimale straal van een holle bol Een planeettijdreismachine
Een planeettijdreismachine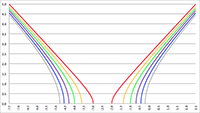 De integralen van
De integralen van Gravitationele rood-/blauwverschuiving
Gravitationele rood-/blauwverschuiving Getijdenkrachten
Getijdenkrachten Zijn wij vroeg of laat?
Zijn wij vroeg of laat? Overzichtspagina wiskunde
Overzichtspagina wiskunde Overzichtspagina natuurkunde
Overzichtspagina natuurkunde Overzichtspagina filosofie
Overzichtspagina filosofie Doneer enkele euro’s
Doneer enkele euro’s Wetenschappelijke boeken te koop
Wetenschappelijke boeken te koop Lezingen
Lezingen